























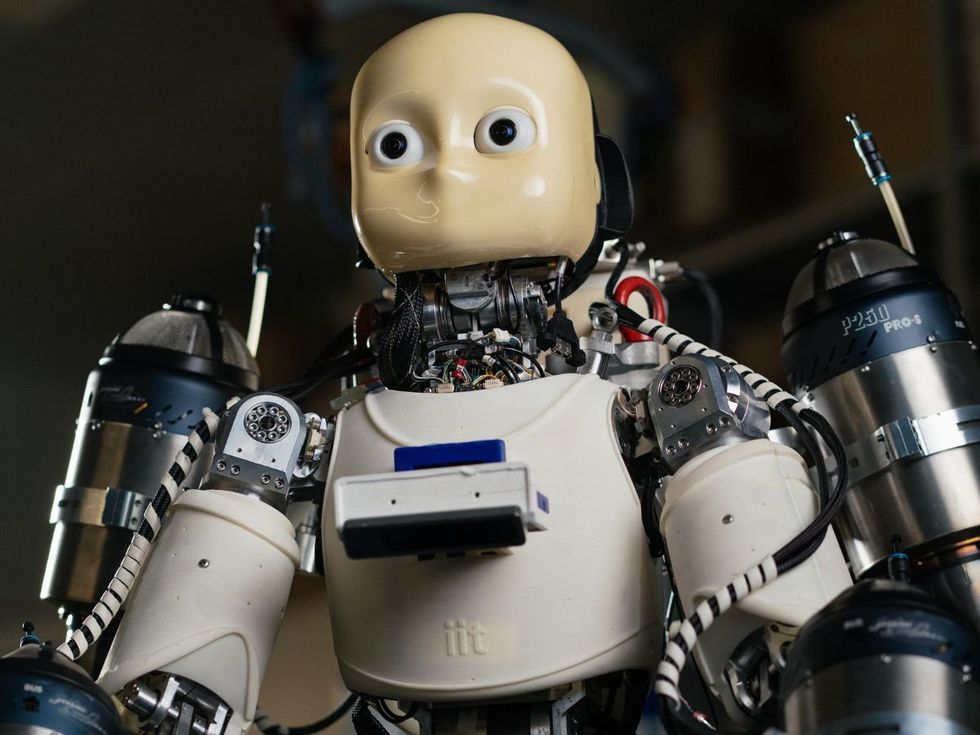
A groundbreaking achievement in robotics occurred this summer when the iRonCub3, a flying humanoid robot developed by Daniele Pucci at the Italian Institute of Technology (IIT) in Genoa, Italy, successfully achieved liftoff and stable flight. This milestone follows nearly a decade of research and development focused on enabling the humanoid robot to fly using a jet propulsion system. The iRonCub, designed to resemble a five-year-old child, lifted approximately 50 centimeters off the ground for several seconds, marking a significant advancement in robotic technology.
The long-term vision for the iRonCub is to serve as a disaster response platform. In emergency situations such as floods or fires, the robot could quickly navigate to affected areas, avoiding obstacles in its path. Upon landing, it would transition to walking, using its arms and hands to remove debris and open doors. “We believe in contributing to something unique in the future,” Pucci stated. “We have to explore new things, and this is wild territory at the scientific level.”
Technical Challenges and Innovations
Creating a humanoid robot capable of flight presents numerous challenges. The jet turbines attached to the iRonCub’s back and arms generate over 1,000 N of thrust. However, the engines require time to spool up or down, necessitating precise control from the robot itself to maintain stability during flight. Pucci explained, “What is not visible from the video is that the exhaust gas from the turbines is at 800 degrees Celsius and almost supersonic speed.” The team must carefully manage the emission gases to prevent damaging the robot and address aerodynamic forces that have not previously been considered for humanoid robots.
In June, Pucci’s team published a paper in Nature Engineering Communications, detailing a comprehensive approach to modeling and controlling aerodynamic forces on humanoid robots using both classical and learning techniques. This research not only supports the iRonCub project but also has broader implications for robotics, including potential applications in other flying platforms such as eVTOL aircraft.
Moreover, Pucci noted a recent collaboration with an industrial company focused on developing a new pneumatic gripper. They discovered that the dynamics of controlling the gripper closely resemble those of the jet turbines, allowing them to apply the same tools for gripper control. “That was an ‘ah-ha’ moment for us: first you do something crazy, but then you build the tools and methods, and then you can actually use those tools in an industrial scenario. That’s how to drive innovation,” he remarked.
The Future of iRonCub
Beyond technical advancements, projects like the iRonCub play a vital role in attracting talent to Pucci’s lab and fostering enthusiasm among students and researchers. During a recent visit to IIT, the energy and excitement surrounding the iRonCub project were palpable, reminiscent of the DARPA Robotics Challenge. “When people know they’re working on something really cool, there’s a tangible, pervasive excitement,” Pucci observed.
Looking ahead, the team plans to incorporate a new jetpack design with added degrees of freedom to improve yaw control during flight. They also aim to equip the iRonCub with wings for more efficient long-distance travel. However, the logistics of testing the robot are becoming increasingly complex. Current tests are limited to a rooftop facility, and future experiments may require coordination with the Genoa airport.
Despite these challenges, Pucci remains committed to the project. “This is not a joke. It’s something that we believe in. And that feeling of doing something exceptional, or possibly historical, something that’s going to be remembered—that’s something that’s kept us motivated. And we’re just getting started,” he concluded.